“场景”让PyTorch创始人直呼「Amazing」的视频「脑补」,动态场景NeRF合成速度提升百倍
今天,很高兴为大家分享来自机器之心Pro的让PyTorch创始人直呼「Amazing」的视频「脑补」,动态场景NeRF合成速度提升百倍,如果您对让PyTorch创始人直呼「Amazing」的视频「脑补」,动态场景NeRF合成速度提升百倍感兴趣,请往下看。
选自arXiv
作者:Ang Cao等
机器之心编译
编辑:袁铭怿
来自的密歇根大学的研究者提出了「HexPlane」,一种能高效合成动态场景新视图的方法。该研究引起了 PyTorch 创始人 Soumith Chintala 的关注。
从一组 2D 图像中重建和重新渲染 3D 场景,一直是计算机视觉领域的核心问题,它使许多 AR/VR 应用成为可能。过去几年,重建静态场景方面取得了巨大的进展,但也存在局限性:现实世界是动态的,在复杂场景中,运动应是常态的,而非例外情况。
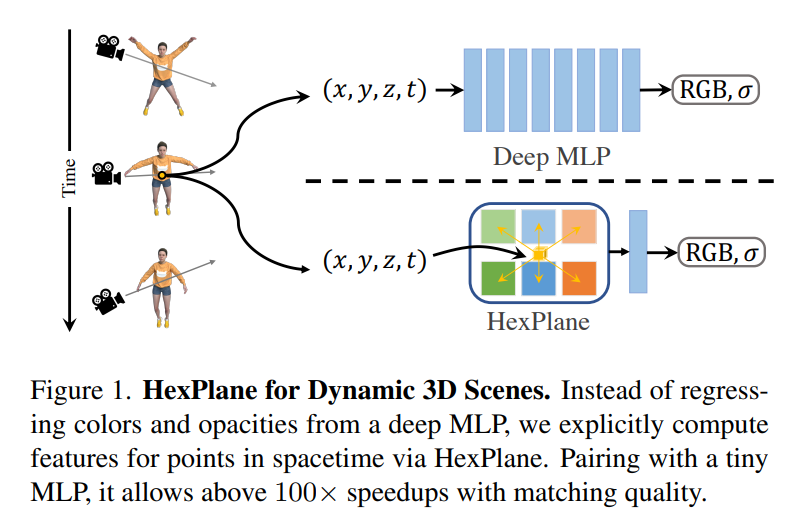
目前许多表征动态 3D 场景的方法都依赖于构建在 NeRF 基础上的隐式表征。他们训练了一个大型多层感知器(MLP),该感知器可以输入点在空间和时间上的位置,并且输出点的颜色或标准静态场景的形变。任何情况下从新视图渲染图像都是耗资巨大的,因为每个生成的像素都需要许多 MLP 来进行计算。训练进程同样也是缓慢的,需要长达数天的 GPU 时间来建模动态场景。这样的计算瓶颈阻碍了相关方法的广泛应用。
通过使用显式混合的方法,最近的几种静态场景建模方法已经实现了比 NeRF 更大的、速度方面的提升。这些方法使用显式空间数据结构,存储显式场景数据或特征,由小型 MLP 解码。这将模型的容量与其速度解耦,并可以实时渲染高质量的图像。不过这些方法虽然有效,但目前只能应用于静态场景。
论文链接:https://arxiv.org/pdf/2301.09632.pdf
项目地址:https://caoang327.github.io/HexPlane/
在最近的一篇论文中,密歇根大学的研究者 Justin Johnson、Ang Cao 为动态 3D 场景设计了显式表征,取得了类似静态场景层面的进展。他们设计了一个存储场景数据的时空数据结构,其中必须克服两个关键的技术挑战:首先是内存使用。研究必须模拟空间和时间中的所有点;在密集的 4D 网格中存储数据将以网格分辨率的四次方进行缩放,这对于大场景或长时间持续是不可行的。其次是稀疏观测。在静态场景中移动单个摄像机可以获得密集覆盖场景的视图;相比之下,在动态场景中移动相机每个时间步只能提供一个视图。单独处理时间步可能无法提供高质量重建的场景覆盖,因此必须实现跨时间步共享信息。
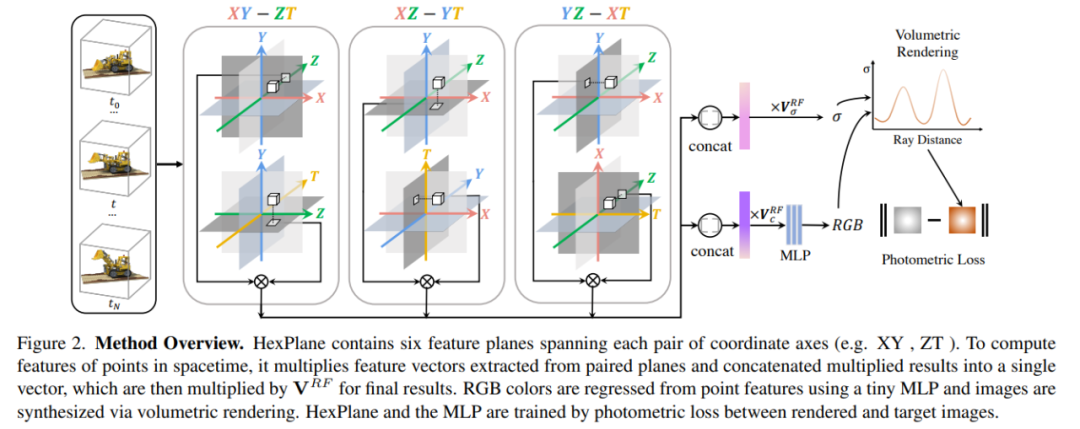
研究者采用新式的 HexPlane 架构克服了这些挑战。受静态场景因子表征的启发,HexPlane 将一个 4D 时空网格分解为跨越每对坐标轴(例如 XY, ZT)的六个特征平面。HexPlane 通过将一个 4D 时空点投影到每个特征平面上,聚合六个结果特征向量来计算时空点的特征向量。然后将融合的特征向量传递给一个小型 MLP,该 MLP 预测点的颜色;之后可以通过体渲染来渲染新视图。
HexPlane 很简洁,且为上述挑战提供了一个巧妙的解决方案。由于它的因子化表征,HexPlane 的内存占用的空间只与场景分辨率成四等分。此外,每个平面的分辨率可以独立调整,以适应需要空间和时间可变容量的场景。由于一些平面仅依赖于空间坐标(例如 XY),通过构建 HexPlane,可以促进不相交的时间步长之间的信息共享。
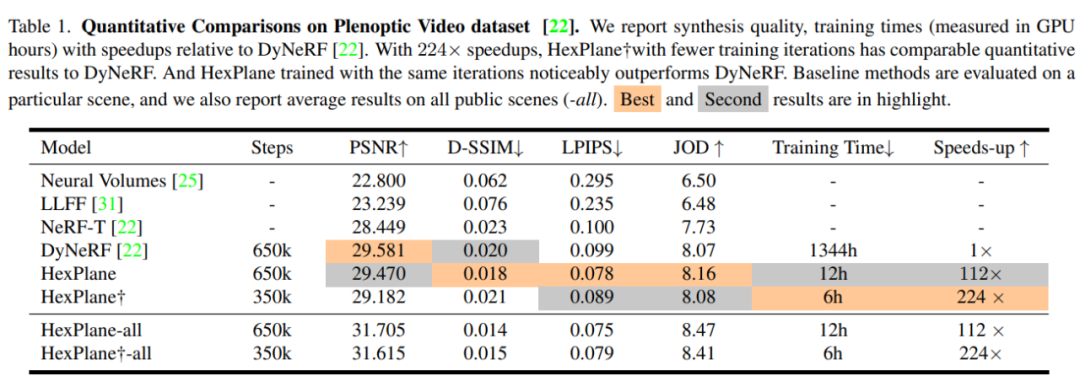
实验结果表明,HexPlane 是一种能高效合成动态场景新视图的方法。研究者在 Plenoptic 视频数据集上匹配了先前工作的图像质量,但将训练速度提高了 100 多倍;该方法也在单目视频数据集上优于先前所采用的方法。多项消融实验验证了 HexPlane 设计的合理性,并证明了它对不同的特征融合机制、坐标系(矩形与球面)和解码机制(球面谐波与 MLP)具有鲁棒性。
此前基于 MLP 的方法需要超过 1400 GPU 小时进行单个视图训练,而该方法在 10 小时内以相同的质量完成训练,加速超过 100 倍。
HexPlane 是一种简单、明确、通用的动态 3D 场景表征。它对底层场景做的假设最少,并且不依赖于变形场或特定类别的先验。除了改进和加速视图合成外,HexPlane 有望能在动态场景的广泛研究中发挥作用。
方法概述
在给定一组动态场景的姿势和时间戳图像的前提下,研究者的目标是让模型适应场景,从而能以新的姿势和时间渲染新图像。像 NeRF 一样,模型给出时空点的颜色和不透明度;图像是通过沿射线的可微体积渲染来呈现。该模型使用渲染图像和 ground-truth 图像之间的光度损失进行训练。
本文的主要贡献在于新动态 3D 场景的显式表征,研究者将其与小型隐式 MLP 相结合,从而在动态场景中实现新的视图合成。输入时空点用于有效地查询特征向量的显式表征。一个小型 MLP 接收特征以及点坐标和视图方向,并为点返回输出 RGB 颜色。模型概述见图 2。
为动态 3D 场景设计显式表征存在一定的挑战。静态 3D 场景通常由点云、体素或网格建模,动态场景的显式表征尚未得到充分探索。该研究展示了如何通过简单的 HexPlane 表征来克服内存使用和稀疏观测的关键技术挑战。
实验结果
动态新视图综合结果
如图 3 所示,HexPlane 可以跨时间和视点给出高质量的动态的、新颖的视图合成结果。
与其他 SOTA 方法的定量对比见表 1。
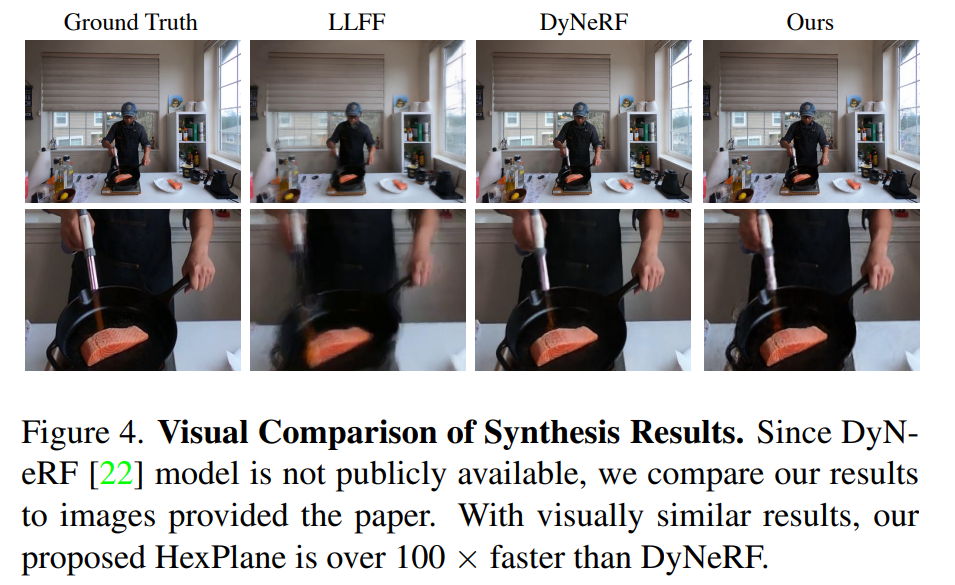
鉴于 DyNeRF 的模型未公开,因此很难直接比较可视化结果。本文从原论文中下载图像,并在检索结果中找到了最匹配的图像,如图 4 所示。
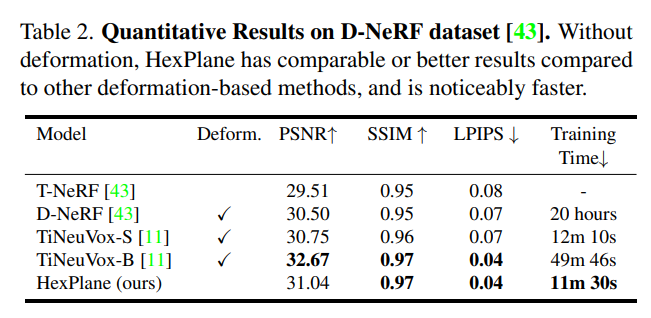
D-NeRF 数据集的定量结果如表 2 所示:
消融和分析
研究者还比较了 HexPlane 与表 3 中方法提到的部分其他设计:

HexPlane 的对称性极佳,包含所有的坐标轴对。研究者通过打破这种对称性计算了表 4 中的其他变体。
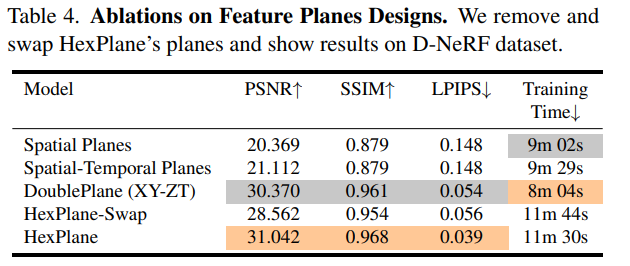
表 5 和图 5 都表明,Multiply-Concat 并不是唯一可行的设计。Sum-Multiply 和它的交换版本 Multiply-Sum 产出的结果也都不错,尽管不是最优的,这也表明了乘法和加法之间的对称性。
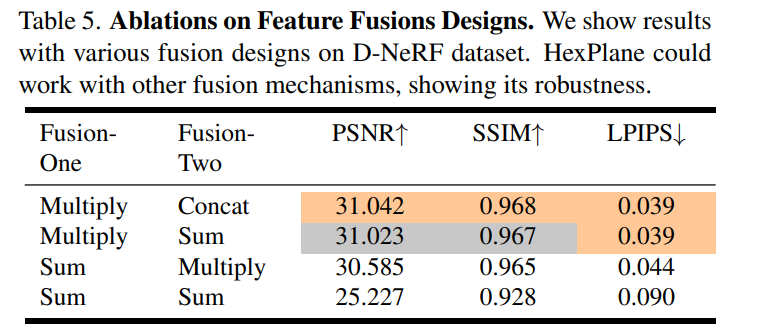
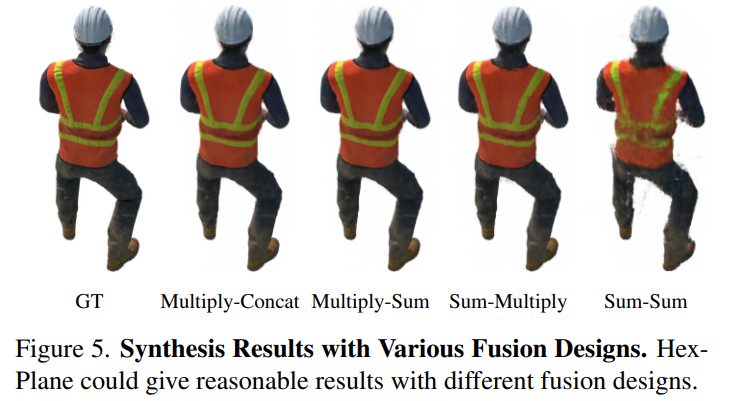 图 6 中显示了不同时空网格分辨率的定性结果:
图 6 中显示了不同时空网格分辨率的定性结果:
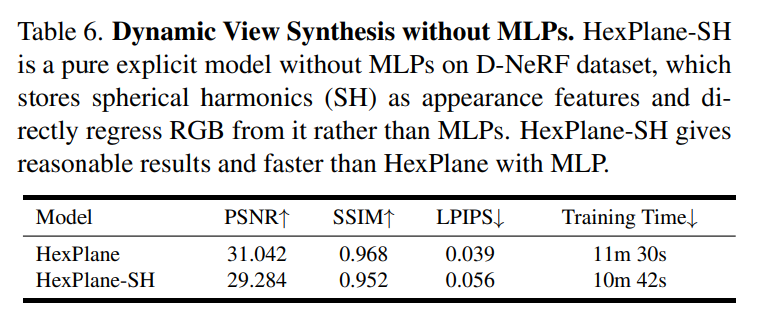
表 6 展示了在没有 mlp 的情况下,研究对纯显式模型的评估:
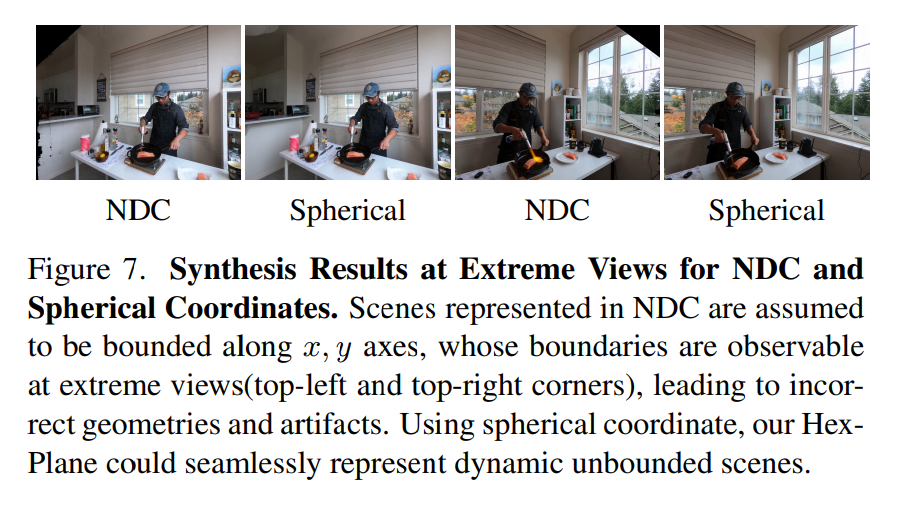
无界场景的重新参数化
图 7 展示了使用小 x, y 边界的 NDC 的 HexPlane 在极端视图下的合成结果,无法对边界附近或边界外的对象建模。
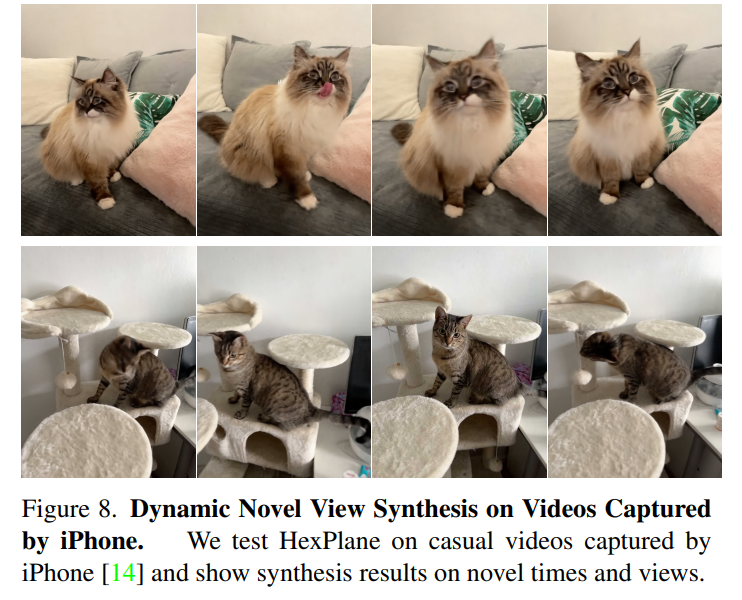
查看真实视频的合成结果
研究者采用 iPhone 拍摄的单目视频来测试 HexPlane,其相对随意的摄像轨迹更接近真实的用例。具体合成结果见图 8。
更多研究细节,可参考原论文。
好了,关于让PyTorch创始人直呼「Amazing」的视频「脑补」,动态场景NeRF合成速度提升百倍就讲到这。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“科技金融网”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场,如有侵权,请联系我们删除。
相关文章
- “西湖”西湖大学成立5周年,施一公:做创新的守护者是使命也是未来
- “儿子”妈妈将50余万“读书钱”存儿子名下,19岁儿子取出转给女友,妈妈无奈起诉追回
- “力学”王博已任大连理工大学副校长
- “说了”云朵的话语,心灵的方剂 ——读周实《有些话语好像云朵》
- “超新星”云南天文台发现Ia型超新星前身星候选体
- “科幻”和成都和教育,一起遇见未来!两份重要“科幻教育”名单公布
- “红星”梁静茹南京演唱会再现“柱子票” 主办方:临时布置追光灯,正与观众沟通
- “导盲犬”视障女子自曝带导盲犬进公园遭保安阻拦 公园方:天色较晚不知其实情,沟通后已放行
- “小行星”首次!我国计划实施近地小行星防御任务
- “肿瘤”科学家揭示肿瘤免疫逃逸新机制,鉴定三个癌症生存相关因子,为肿瘤免疫治疗注入新动力
- “成都”2023年成都“三新”生活节启动,第三批消费新场景发布
- “模型”评论能力强于GPT-4,上交开源13B评估大模型Auto-J
- “科幻”科幻大会主题展开展!3D宇宙飞船已着陆,三体宇宙、五维空间等待探索
- “场景”中兴通讯首席发展官崔丽:乘云慧智 助力政企腾飞
- “模型”毫末新品主打“极致性价比”!张凯:让中阶智驾便宜更好用,让高阶智驾好用更便宜
- “电梯”中国移动联合产业完成“一体化皮站”电梯场景试点验证,持续提升室内覆盖质量
- “家居”政策发力场景创新 家居市场需求拉动消费增长
- “锦江”“元游锦江”再次升级!快去成都春熙路解锁新场景
- “智能”前沿观点集锦| 全屋智能朋友们:聚于智能,共话未来
- “会议室”见证数字化的魅力!MAXHUB亮相第二十三届中国国际投资贸易洽谈会









